Piston Equations of Motion
Piston Equations of Motion
CCN Studios@FreeFromCreations
© 2012-Present CCN Studios
Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International Public License
Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International Public License

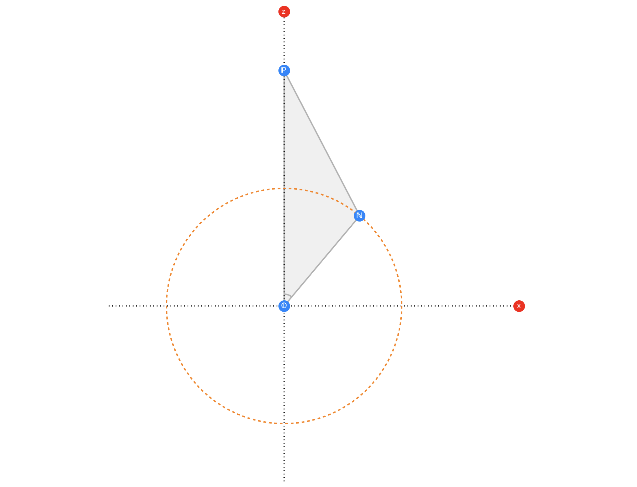
By Law of Cosines establish an equation between the length of line 𝕆ℕ namely r radius for crank
and length of line namely z coordinate for piston and length of line namely ℓ and Cosine of
angle between the lines and namely θ = ∠ .
● Solve the equation for z(θ) as a function of angle θ
● Set θ(t) = ωt as a linear function of time
● Increment t ⟶ t + Δt for each step of the animation loop
and length of line namely z coordinate for piston and length of line namely ℓ and Cosine of
angle between the lines and namely θ = ∠ .
● Solve the equation for z(θ) as a function of angle θ
● Set θ(t) = ωt as a linear function of time
● Increment t ⟶ t + Δt for each step of the animation loop
Compute the Law of Cosines for θ = ∠
Compute the Law of Cosines for θ = ∠
● Set piston initial position at (0,0,z) ● Piston is bound only to move vertically up or down● Compute the dot product .
In[]:=
Pv={0,0,z}Nv=r*{Sin[θ],0,Cos[θ]}(*computethedotproduct.*)dot2=(Pv-Nv).(Pv-Nv)
Out[]=
{0,0,z}
Out[]=
{rSin[θ],0,rCos[θ]}
Out[]=
2
(z-rCos[θ])
2
r
2
Sin[θ]
Expand and Simplify .
Expand and Simplify .
In[]:=
Expand[dot2]
Out[]=
2
z
2
r
2
Cos[θ]
2
r
2
Sin[θ]
In[]:=
rhs=Simplify@Expand[dot2]
Out[]=
2
r
2
z
In[]:=
Simplify@Expand[Norm[(Pv-Nv)]^2/.{Abs->Identity}]===rhs
Out[]=
True
Solve the Law of Cosines for z
Solve the Law of Cosines for z
In[]:=
Solve[l^2==r^2+z^2-2*r*z*Cos[θ]&&z>0&&l>2*r&&r>0&&l>0,{z},Reals]
Out[]=
z
Make a new function pistonz [r ,l , θ] which outputs
In[]:=
pistonz[r_,l_,θ_]:={0,0,r*Cos[θ]+Sqrt[l^2-r^2*Sin[θ]^2]};
In[]:=
pistonz[r,l,θ]
Out[]=
0,0,rCos[θ]+-
2
l
2
r
2
Sin[θ]
Check the length of pistonz [r ,l , θ] vector is always l
Check the length of pistonz [r ,l , θ] vector is always l
In[]:=
SquaredEuclideanDistance[pistonz[r,l,θ],r*{Sin[θ],0,Cos[θ]}]/.{Abs->Identity}
Out[]=
2
l
Compute the speed of the Piston
Compute the speed of the Piston
In[]:=
D[pistonz[r,l,θ],θ]
Out[]=
0,0,-rSin[θ]-Cos[θ]Sin[θ]-
2
r
2
l
2
r
2
Sin[θ]
Compute the acceleration of the Piston
Compute the acceleration of the Piston
In[]:=
D[pistonz[r,l,θ],{θ,2}]
Out[]=
0,0,-rCos[θ]---+-
4
r
2
Cos[θ]
2
Sin[θ]
3/2
(-)
2
l
2
r
2
Sin[θ]
2
r
2
Cos[θ]
2
l
2
r
2
Sin[θ]
2
r
2
Sin[θ]
2
l
2
r
2
Sin[θ]
Compute the parametric path of the Piston as a function of time t
Compute the parametric path of the Piston as a function of time t
In[]:=
pistonz[r,l,θ]/.{θ->(ω*t)}
Out[]=
0,0,rCos[tω]+-
2
l
2
r
2
Sin[tω]
Compute z(0)
Compute z(0)
In[]:=
FullSimplify[PowerExpand@(pistonz[r,l,ω*t]/.{t->0})]
Out[]=
{0,0,l+r}
Compute as function of θ
Compute as function of θ
In[]:=
vN[θ_]=r*{Sin[θ],0,Cos[θ]};
In[]:=
PN=vN[θ]-pistonz[r,l,θ]
Out[]=
rSin[θ],0,--
2
l
2
r
2
Sin[θ]
In[]:=
dot=PN.({0,0,0}-pistonz[r,l,θ])
Out[]=
---rCos[θ]--
2
l
2
r
2
Sin[θ]
2
l
2
r
2
Sin[θ]
Compute Angle ∠
Compute Angle ∠
Dot product of pistonz[r,l,θ] vector and divide by their corresponding norms is the Cos( )
In[]:=
PowerExpand[dot/(Norm[PN]*Norm[{0,0,0}-pistonz[r,l,θ]])/.{Abs->Identity}]
Out[]=
--
2
l
2
r
2
Sin[θ]
l
Compute Angle ∠
Compute Angle ∠
In[]:=
NP=-vN[θ]+pistonz[r,l,θ]NO={0,0,0}-vN[θ]
Out[]=
-rSin[θ],0,-
2
l
2
r
2
Sin[θ]
Out[]=
{-rSin[θ],0,-rCos[θ]}
In[]:=
dot=NP.NO
Out[]=
2
r
2
Sin[θ]
2
l
2
r
2
Sin[θ]